En la materia de Automatización y Control, dirigida por la Mtra. Luz María Sánchez, los alumnos han presentado su proyecto final con una impresionante muestra de ingenio y habilidad técnica. El objetivo del proyecto fue construir y automatizar una plataforma para vuelo vertical con controlador PID, incorporando sensores para la captura de datos y programando el sistema en Matlab.
Diseño y Construcción de la Plataforma
El proyecto comenzó con una fase de diseño donde los estudiantes conceptualizaron una plataforma capaz de realizar vuelos verticales. El diseño debía ser estable y permitir el control preciso de la altura y estabilidad de la plataforma.
Componentes Principales:
- Estructura de la plataforma: Construida con materiales ligeros y resistentes para soportar los componentes y permitir un vuelo estable.
- Motores: Proporcionaron la fuerza necesaria para el despegue y el control del vuelo vertical.
- Controlador PID: Implementado para ajustar automáticamente la potencia de los motores y mantener la plataforma estable.
- Sensores: Utilizados para la captura de datos en tiempo real, esenciales para el funcionamiento del controlador PID. Incluyeron acelerómetros, giroscopios y sensores de altitud.

Implementación del Controlador PID
El controlador PID (Programador Derivativo Integrativo) fue la pieza clave del proyecto, ya que permitió el ajuste preciso de la potencia de los motores para mantener la plataforma en vuelo vertical estable.
Pasos en la Implementación:
- Modelado Matemático: Los alumnos desarrollaron un modelo matemático de la dinámica del vuelo vertical de la plataforma.
- Sintonización del PID: Utilizando Matlab, los estudiantes sintonizaron los parámetros del controlador PID (Kp, Ki, Kd) para obtener una respuesta óptima.
- Pruebas y Ajustes: Realizaron múltiples pruebas para ajustar los parámetros del PID, asegurando que la plataforma respondiera adecuadamente a las perturbaciones y cambios de carga.

Integración de Sensores y Programación en Matlab
Los sensores jugaron un papel crucial en la captura de datos en tiempo real, necesarios para el funcionamiento del controlador PID.
Sensores Utilizados:
- Acelerómetros y Giroscopios: Proporcionaron datos sobre la orientación y movimiento de la plataforma.
- Sensores de Altitud: Medían la altura de la plataforma, permitiendo ajustes precisos en la potencia de los motores para mantener la altura deseada.
La programación en Matlab permitió a los estudiantes integrar todos estos componentes de manera eficiente. Matlab se utilizó para:
- Procesar los datos de los sensores: Filtrando y ajustando los datos para su uso en el controlador PID.
- Simular el comportamiento del sistema: Antes de realizar pruebas físicas, permitiendo ajustes iniciales sin riesgo.
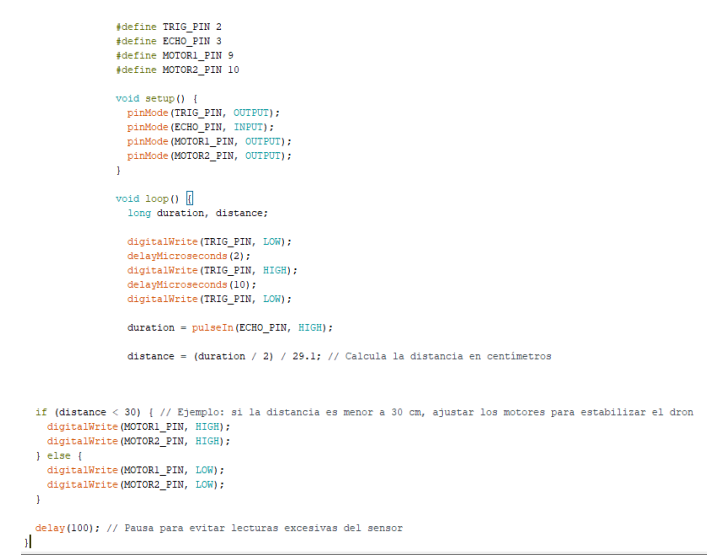
- Implementar el controlador PID: Controlando los motores en tiempo real basado en los datos recibidos de los sensores.

Desafíos y Soluciones
Durante el desarrollo del proyecto, los estudiantes enfrentaron varios desafíos:
- Estabilidad de la plataforma: Ajustar los parámetros del PID para lograr una estabilidad óptima requirió numerosas iteraciones y pruebas.
- Precisión de los sensores: Asegurar que los sensores proporcionaran datos precisos y fiables fue fundamental para el control del sistema.
- Integración de hardware y software: La sincronización entre los sensores, el controlador PID y los motores necesitó una coordinación precisa y ajustes finos en el código de Matlab.

Resultados y Aprendizajes
El proyecto resultó en una plataforma para vuelo vertical que demostró un control preciso y estabilidad gracias al controlador PID. Los estudiantes aprendieron valiosas lecciones sobre el diseño y la automatización de sistemas complejos.
Aprendizajes Clave:
- Modelado y simulación: Importancia de modelar y simular sistemas antes de construir y probar físicamente.
- Controladores PID: Profunda comprensión de cómo sintonizar y ajustar un controlador PID para lograr el comportamiento deseado.
- Integración de sistemas: Coordinación efectiva entre hardware y software para lograr un sistema automatizado funcional.
Conclusión
El proyecto final en la materia de Automatización y Control, guiado por la Mtra. Luz María Sánchez, fue un éxito rotundo.
Los estudiantes demostraron su capacidad para diseñar, construir y automatizar una plataforma de vuelo vertical utilizando un controlador PID y Matlab.
Este proyecto no solo destacó sus habilidades técnicas, sino también su capacidad para trabajar en equipo, resolver problemas y aplicar conocimientos teóricos en un contexto práctico.
Sin duda, estos futuros ingenieros están bien preparados para enfrentar desafíos en el campo de la automatización y control.
Fuente: Clase de la Mtra. Luz María Sánchez Rivera
Ingeniería en Mecánica Industrial
Más noticias sobre Mecánica Industrial
