Nos enorgullece compartir los logros alcanzados por nuestros estudiantes al haber diseñado y controlado un brazo robótico con potenciómetros en el proyecto final de la materia de Sistemas de Control Numérico, bajo la guía del profesor Virgilio Caballero.
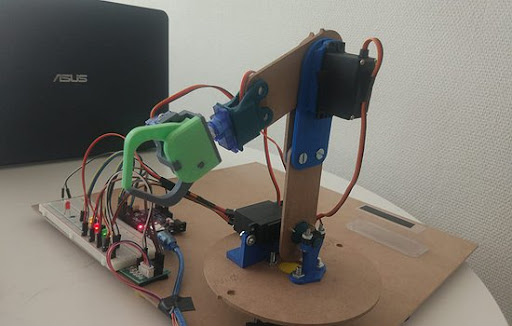
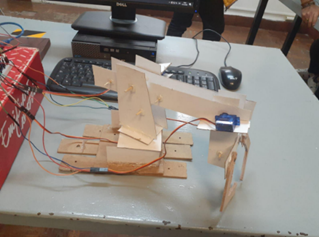
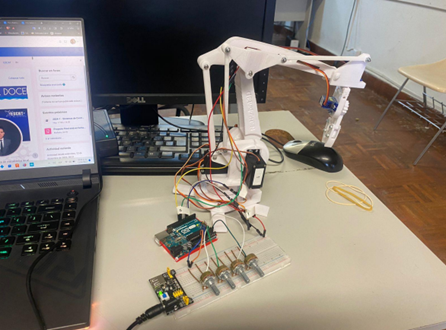
Este proyecto demostró la fusión magistral de teoría y práctica, con los alumnos diseñando un esquema para el control de un brazo robótico, impulsado por cuatro servomotores y controlado mediante potenciómetros.
Desde el comienzo de la materia, se ha inculcado en los estudiantes una mentalidad innovadora y una profunda comprensión de los sistemas de control numérico. Este proyecto final desafió a los alumnos a aplicar sus conocimientos para crear un sistema real que superara los límites convencionales.
Proyecto Final de la Materia de Sistemas de Control Numérico
Cada grupo de estudiantes se embarcó en el diseño de un esquema de control para un brazo robótico con cuatro servomotores. Este desafío no solo requirió conocimientos teóricos sólidos, sino también una comprensión aguda de la mecánica y dinámica de los sistemas robóticos.
Lo más destacado de este proyecto fue la implementación del control mediante potenciómetros. Los alumnos no solo diseñaron el esquema electrónico para incorporar cuatro potenciómetros, sino que también desarrollaron algoritmos de control que permitieron a los usuarios operar el brazo robótico de manera intuitiva y precisa.
Durante la presentación final, mostraron con orgullo su brazo robótico en acción. Los potenciómetros permitieron un control fluido y preciso de los movimientos del brazo, destacando el éxito de la implementación de los sistemas de control numérico en un entorno práctico.
Este proyecto deja una marca duradera en la historia de nuestra comunidad académica, y estamos emocionados por el impacto que estos brillantes ingenieros tendrán en el campo de la automatización y control numérico. ¡Felicidades a todos por este logro notable!
Fuente: Trabajo de alumnos
Ingeniería en Mecatrónica
Más noticias sobre Mecatrónica
