En el marco de la materia de Mecanismos, impartida por el Mtro. Agustín Erasmo, los alumnos han culminado con éxito su proyecto final.
Se destacó la creatividad y la aplicación práctica de conocimientos adquiridos durante el curso. El objetivo principal fue diseñar y construir un prototipo funcional de manivela de corredera centrada, integrando diversas competencias técnicas y de diseño.
Diseño y Construcción del Prototipo
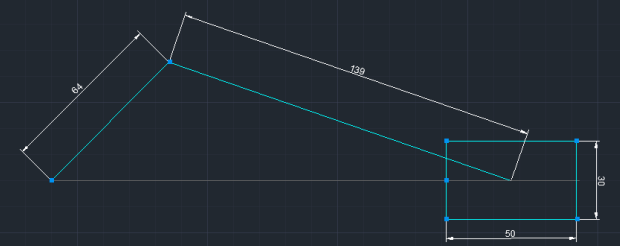
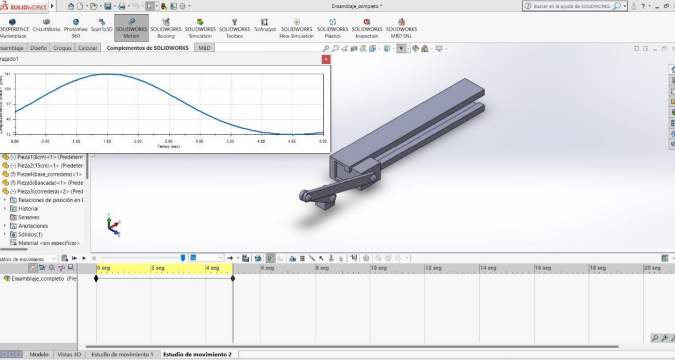
El proyecto comenzó con una fase de diseño en la que los alumnos emplearon software de modelado 3D para conceptualizar el mecanismo.
Cada pieza, desde el balancín hasta los eslabones, fue meticulosamente modelada, asegurando precisión y funcionalidad en el ensamblaje final.
Materiales Utilizados:
- Balancín: Actuó como el elemento oscilante del mecanismo, transfiriendo el movimiento de la manivela a la corredera.
- Bicla: Una bicicleta que se adaptó como base y fuente de movimiento inicial.
- Eslabones: Conectaron la manivela y el balancín, permitiendo la transmisión del movimiento rotativo en lineal.
- Manivela: El componente clave que, al girar, iniciaba el movimiento del mecanismo.
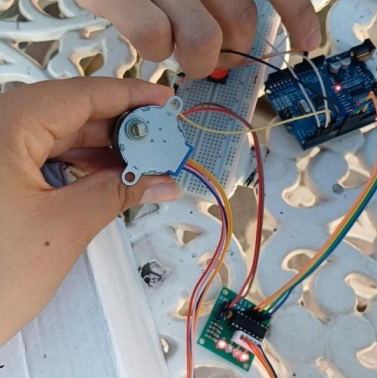
- Motor a pasos: Proporcionó el control preciso del movimiento rotativo de la manivela.
- Servomotor: Utilizado para ajustar la posición del balancín y optimizar el movimiento del mecanismo.

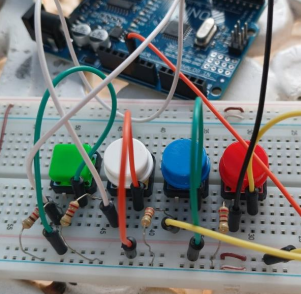
Integración Electrónica y Programación
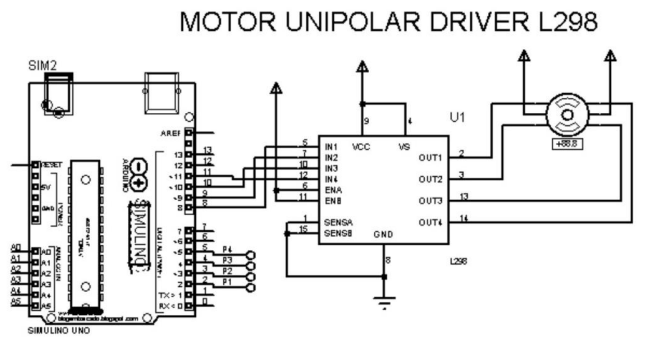
Para automatizar y controlar el movimiento del mecanismo, los alumnos programaron un Arduino. La programación incluyó:
- Control del motor a pasos: Para garantizar que la manivela girara a la velocidad y en la dirección correctas.
- Sincronización del servomotor: Asegurando que el balancín se moviera con precisión, sincronizado con la manivela.
- Sensores y retroalimentación: Algunos proyectos incorporaron sensores para monitorear y ajustar el movimiento en tiempo real, mejorando la precisión y eficiencia del mecanismo.
Desafíos y Soluciones
A lo largo del desarrollo del proyecto, los alumnos enfrentaron varios desafíos:
- Alineación precisa de componentes: Fue crucial para evitar el desgaste y asegurar un movimiento suave. Esto se resolvió con ajustes finos en el modelado 3D y pruebas iterativas.
- Integración de electrónica y mecánica: La sincronización entre el motor a pasos y el servomotor requirió ajustes detallados en el código de Arduino para evitar desfasamientos y garantizar un movimiento coordinado.
- Selección de materiales: Optaron por materiales ligeros pero resistentes para asegurar la durabilidad y funcionalidad del prototipo sin sobrecargar los motores.

Resultados y Aprendizajes
El proyecto no solo demostró la habilidad técnica de los alumnos, sino también su capacidad para trabajar en equipo y resolver problemas complejos.
Los prototipos finales funcionaron de acuerdo con las expectativas, mostrando movimientos suaves y precisos, reflejando una comprensión profunda de los principios de los mecanismos.
Aprendizajes Clave:
- Importancia del modelado 3D: Permite prever y corregir posibles problemas antes de la construcción física.
- Sincronización y control electrónico: Fundamental para la automatización y precisión de los mecanismos.
- Trabajo colaborativo: Esencial para proyectos de ingeniería complejos, donde cada miembro aporta habilidades y conocimientos específicos.
Conclusión
El proyecto final de los alumnos del Mtro. Agustín Erasmo en la materia de Mecanismos ha sido un rotundo éxito.
A través de la combinación de diseño 3D, programación en Arduino y una cuidadosa selección de materiales, los estudiantes no solo demostraron su competencia técnica, sino también su creatividad e innovación.
Este tipo de proyectos prácticos prepara a los futuros ingenieros para enfrentar desafíos reales, equipándolos con las habilidades necesarias para sobresalir en el campo de la ingeniería mecánica y mecatrónica.



Fuente: Clase del Mtro. Agustín Erasmo
Ingeniería en Mecatrónica
Más noticias sobre Ingeniería en Mecatrónica
