
¿Cómo la dinámica del brazo humano ayuda a robots? Los investigadores construyeron una plataforma dinámica de adquisición de datos para capturar el movimiento del brazo humano durante las tareas de montaje.
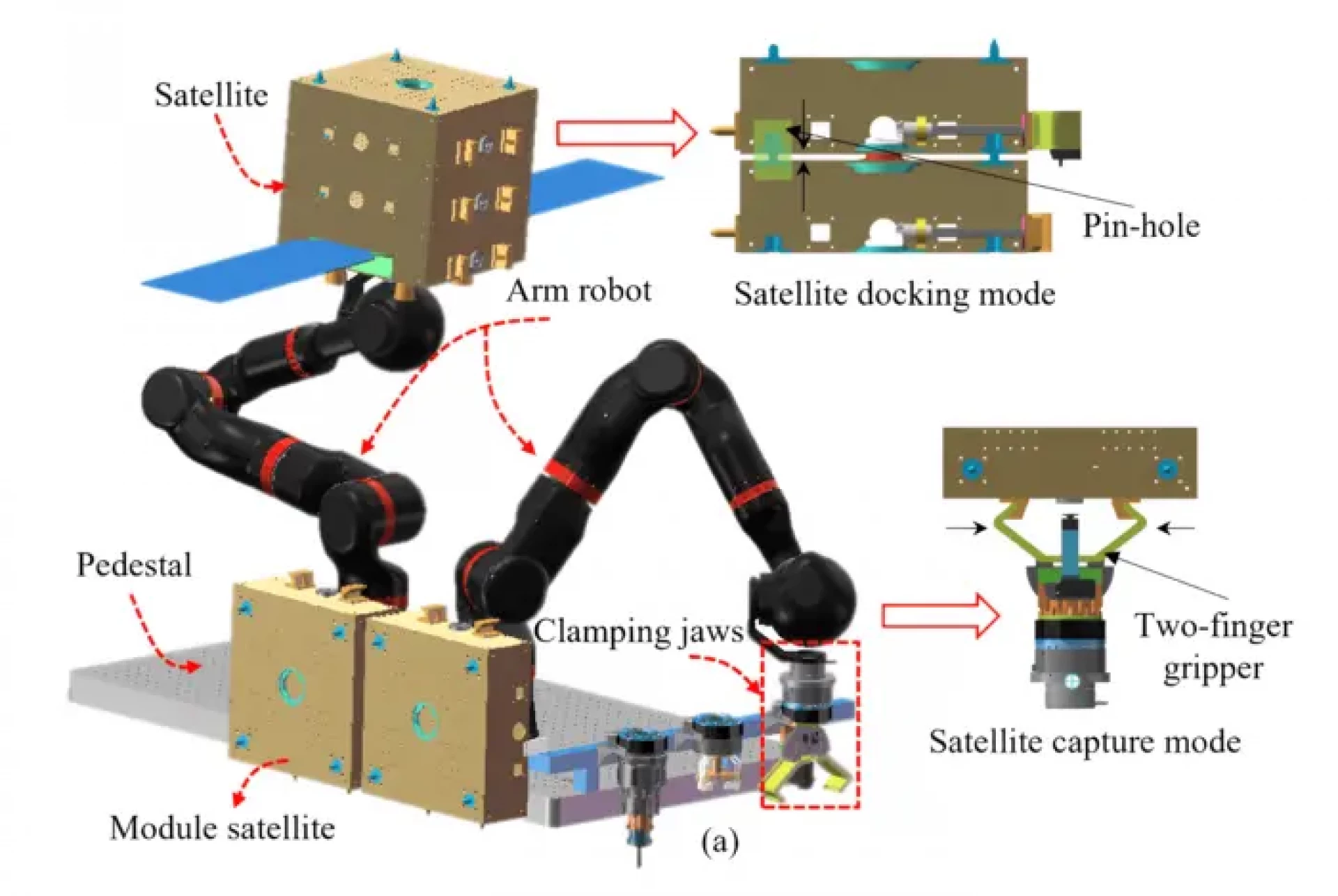
Un equipo de investigadores del Instituto de Tecnología de Beijing ha desarrollado un nuevo método para controlar robots que pueden ensamblar satélites en el espacio.
La técnica está inspirada en el brazo humano, que puede ajustar su amortiguación para realizar diferentes tareas con precisión y estabilidad.
Los investigadores publicaron sus hallazgos en Cyborg y Bionic Systems.
Operaciones espaciales con robots y desafíos.
Las operaciones espaciales requieren que los robots interactúen con objetos en entornos complejos y dinámicos.
Anterior a los métodos tradicionales de control de robots, tienen limitaciones para adaptarse a situaciones diversas e inciertas y son propensos a vibraciones, lo que puede provocar fallas en el ensamblaje.
Para superar estos desafíos, los investigadores propusieron un método de control de admitancia variable similar al humano basado en las características de amortiguación variables del brazo humano.
La amortiguación es el proceso de reducir la amplitud de oscilaciones o vibraciones mediante la disipación de energía.
Es esencial para evitar que una fuerza de contacto excesiva dañe los objetos durante el montaje.
La dinámica del brazo humano puede ajustar de manera flexible estos robots en su amortiguación para realizar diversas tareas de forma segura y estable.
Al sujetar algo frágil, el brazo humano reduce su amortiguación para evitar romperlo, mientras que al empujar un objeto pesado aumenta su amortiguación para ejercer más fuerza.
Los investigadores imitaron esta característica diseñando un controlador de admitancia variable para robots que puede cambiar su amortiguación según las condiciones de contacto y los requisitos de montaje.
Sobre los controladores
El controlador puede compensar perturbaciones externas e incertidumbres ambientales;
Para probar su método, los investigadores construyeron una plataforma dinámica de adquisición de datos para capturar el movimiento del brazo humano durante las tareas de montaje.
Utilizaron un sensor de fuerza ATI omega160 6D para medir la fuerza de contacto entre la mano humana y las piezas de ensamblaje y un mini sistema de captura de movimiento Stereolabs ZED para obtener la velocidad final del brazo humano.
Se analizaron los datos y resumieron las características dinámicas del componente humano, así como tres patrones de contacto para el ensamblaje del satélite:
- Contacto deslizante, contacto de impacto y contacto estable.
Los investigadores aplicaron su método a un robot manipulador que puede ensamblar componentes de satélites en el espacio.
Realizaron simulaciones y experimentos para evaluar el rendimiento de su método en diferentes escenarios y lo compararon con otros métodos de control del cumplimiento.
Fuente: EurekAlert!
Ingeniería en Mecatrónica
Más noticias sobre Mecatrónica
