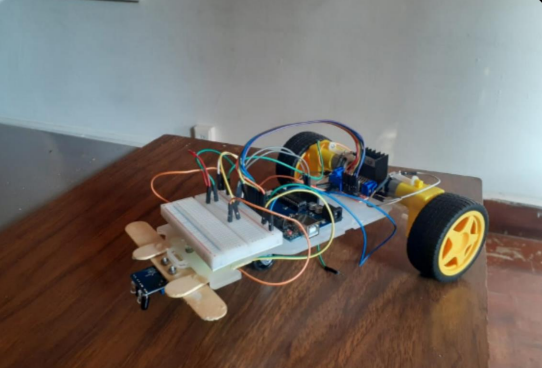
Alumnos de ISC diseñaron robot de seguimiento en la materia Inteligencia Artificial y Robótica para su evaluación ordinaria.
Nuestros alumnos de ISC llevaron a cabo el diseño y programación de un robot de seguimiento de línea como evaluación ordinaria en la materia Inteligencia Artificial y Robótica. Esta materia estuvo a cargo del Mtro. Uriel Alejandro García López.
Para poder desarrollar este proyecto y tener como resultado un robot que puede seguir una línea que conforme una pista o un circuito, nuestros alumnos tuvieron que seguir todo un proceso en el cual llevaron a la práctica todo lo aprendido durante el semestre.
Los puntos que se evaluaron en los proyectos y que nuestros alumnos tuvieron que desarrollar fueron los siguientes:
- 5% Resumen
- 5% Palabras clave
- 5% Marco teórico
- 20% Problema a resolver
- 20% Hipótesis*
- 20% Propuesta o metodología
- 10% Conclusiones
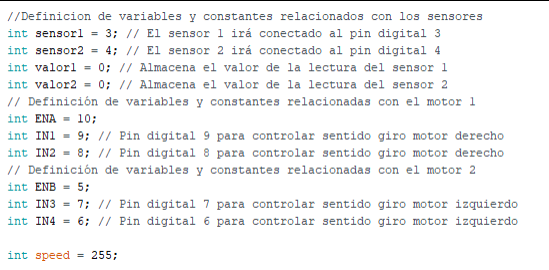
Para que el robot cumpliera con el propósito que este proyecto tenía nuestros alumnos desarrollaron el código del robot con Arduino

Arduino es una plataforma de código abierto que permite crear y configurar sistemas electrónicos a partir de un hardware y un software libres.
Materiales
Estos fueron los materiales que nuestros alumnos utilizaron para la construcción de su robot:
- 2 sensor infrarrojo cny70
- 2 2n222a
- 2 diodos led (1 rojo y 1 verde)
- 1 potenciómetro de 50kohms
- 2 motorreductor con llanta (voltaje de funcionamiento: 4 a 12 vdc)
- 1 protoboard
- 1 Arduino UNO
- 1 Puente H
- 3-Llantas
- 1 chasis
- 1 cable UTP de alambre
- 1 Fuente de voltaje 5 volts
- 1 pila de 9 volts
- Jumpers
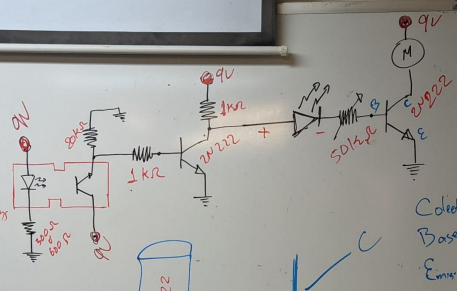
Después de analizar el circuito y tomar las decisiones correctas para poder tener listo el circuito y sobre todo trasladarlo a lo físico para que el robot pueda funcionar como lo deseamos, nos pusimos a trabajar sobre el código, pues no es suficiente con tener hecha la parte física sin la programación, pues es igual de importante para que los componentes se comporten conforme a las requisiciones que se necesiten.
— Trabajo de alumnos Aleman Ortiz Francisco Jesús, Cervantes Canela Joel Alberto, Mejía Morales Monserrat.

Fuente: Trabajos de alumnos
Ingeniería en Sistemas Computacionales
Más noticias sobre Ingeniería en Sistemas Computacionales…
