
Los estudiantes de la carrera de Mecatrónica desarrollaron como proyecto ordinario un carrito evasor de objetos, en el marco de la materia de Microcontroladores, a cargo de la Dra. Luz María. En este proyecto, los alumnos pusieron en práctica los conocimientos adquiridos a lo largo del semestre, aplicando conceptos clave de programación y control de sistemas embebidos para diseñar un prototipo funcional.
Robots Móviles Autónomos

El desarrollo de robots móviles autónomos ha experimentado un crecimiento exponencial en las últimas décadas. Estos dispositivos, capaces de navegar en entornos dinámicos y evitar obstáculos, encuentran aplicaciones en diversos campos como la industria, la exploración y el servicio.
Los microcontroladores han sido fundamentales en esta evolución, permitiendo la implementación de algoritmos de control y procesamiento de datos en dispositivos compactos y de bajo costo. En el caso de robots evasores de obstáculos, los microcontroladores se encargan de recibir las señales de los
sensores, procesar la información y generar las órdenes de control para los actuadores.
El uso de microcontroladores como el PIC18F4550 ha permitido la creación de robots evasores de obstáculos cada vez más sofisticados. Estos dispositivos ofrecen una plataforma flexible y potente para implementar algoritmos de navegación y control.
Desarrollo del Proyecto
Para la realización del proyecto los alumnos utilizaron los siguientes materiales:
- Microcontrolador PIC18F4550.
- Sensor ultrasónico.
- Potenciómetro.
- Motores DC.
- Ruedas para el chasis.
- Rueda giratoria.
- Placa base para prototipos.
- Fuente de alimentación de 5V.
- Resistencias, capacitores y componentes básicos.
- Software MPLAB X IDE.
4 - Software Proteus.
- Programador de microcontroladores (PICkit 2 o
similar).
Código de programación:
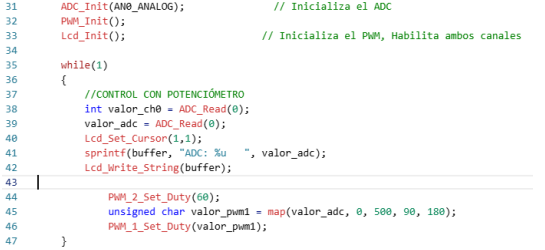
En primer lugar se declara una sola entrada analógica, posteriormente se inicia el PWM y el LCD para visualizar los valores otorgados por el potenciómetro, se asigna una variable para almacenar la lectura de datos del potenciómetro, el PWM2 tiene un valor constante de 60 debido a que en físico este es el
valor mínimo con el que puede funcionar, si fuera 250 el carrito iría demasiado rápido y sería muy difícil controlarlo, para el mapeo se utilizaron valores del potenciómetro de 0 a 500 para obtener un mayor grado de precisión, si hubieran sido hasta los 1023 su control hubiera sido más complejo de lo que
fue, por último se agrega el valor mapeado al PWM1 que es el que controla al servomotor.
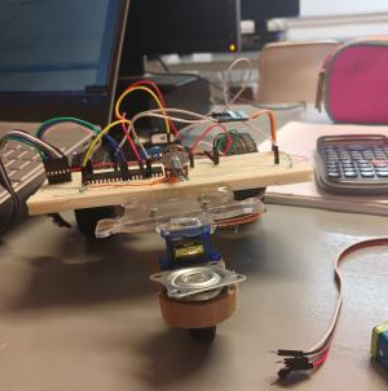
Construcción e Instrumentación
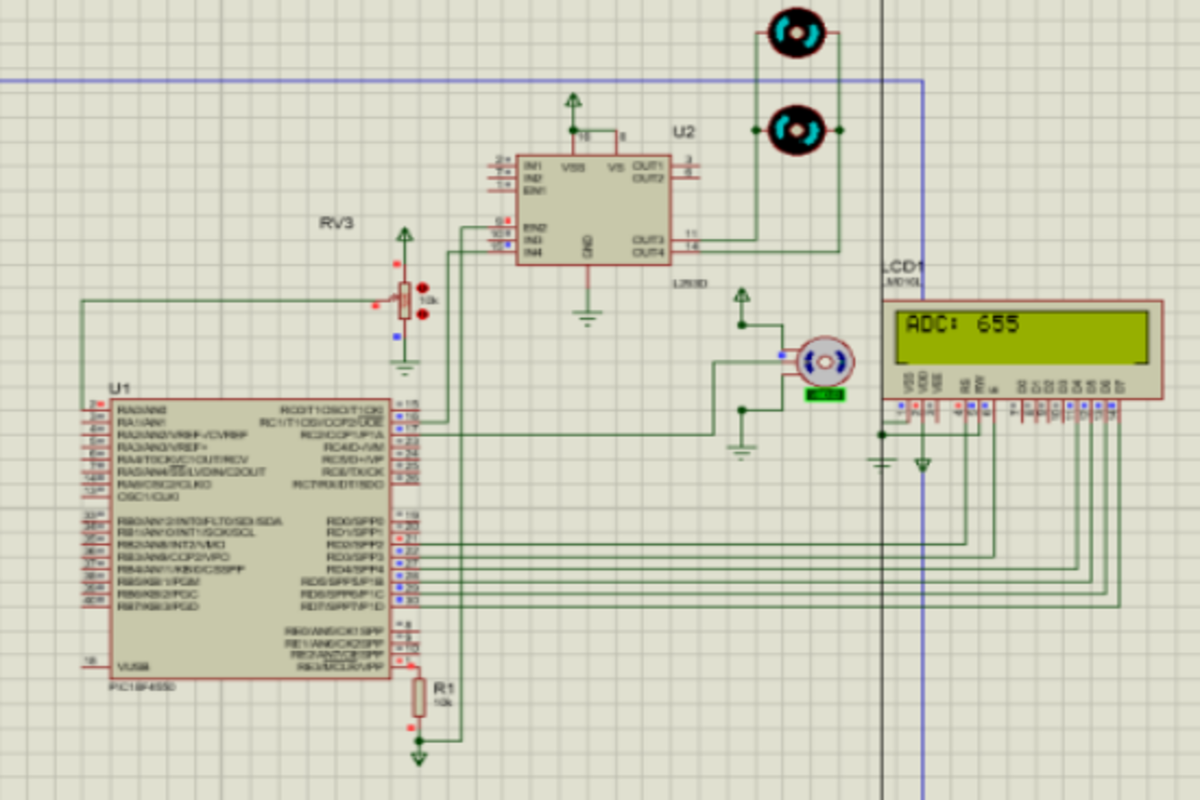
Se realizo una simulación por medio de la plataforma de Proteus, donde se muestra el resultado final del carrito desde su emulación y su construcción.



Fuente: Curso Microcontroladores de la Dra. Luz María.
Más noticias sobre Ingeniería Mecatrónica…
