
Alumna. El pasado noviembre, la alumna Andrea Sandoval Gómez Farías, de Ingeniería en Mecatrónica de la Universidad Internacional (UNINTER), presentó su trabajo de investigación titulado “Desarrollo de robot autónomo a través de robótica evolutiva” en la 9na semana BEIFI
y Proyectos de Investigación organizado por la Escuela Superior de Ingeniería Mecánica y Eléctrica (ESIME) Unidad Culhuacán del Instituto Politécnico Nacional (IPN). Este evento se realiza cada semestre en donde alumnos del nivel de maestría y doctorado del IPN presentan sus proyectos de investigación.
Dicho evento premia a los mejores proyectos, tomando en cuenta la innovación, impacto tecnológico y dominio del tema por parte del ponente. Andrea participó junto a alumnos de maestría y doctora del IPN, posicionándose entre los finalistas.
Fig. 1. Presentación de proyecto de investigación
Andrea está actualmente realizando un prototipo robótico en conjunto con la Universidad Autónoma del Estado de Morelos (UAEM); dicha investigación consiste en crear un robot en forma de serpiente el cual pueda ser capaz de reconocer su ambiente y pueda desplazarse, evadiendo cualquier tipo de obstáculo que se le presente.
La manera en cómo Andrea está desarrollando dicho prototipo es utilizando algoritmos genéticos, los cuales, por medio de sensores instalados en el robot, permiten que el prototipo pueda conocer qué tipi de obstáculos se le presenta y pueda tomar una decisión para poder desplazarse a pesar de ello.
Los algoritmos genéticos son un tipo de inteligencia artificial, los cuales simulan la manera en cómo los seres vivos evolucionamos, se parte de cierto número de poblaciones, los cuales van creando hijos, heredando solamente los mejores de ellos, hasta que finalmente, se obtiene el mejor cromosoma, el cual le da al robot de poder reconocer su entorno y tomar las mejores decisiones.
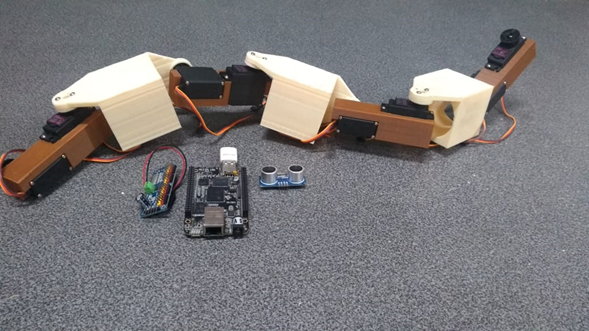
Fig. 2. Prototipo de robot tipo serpiente, junto con sensores y unidad de procesamiento
El reconocimiento del entorno se realiza utilizando sensores ultrasónicos para poder medir la distancia entre los objetos y el robot. La entrada de estos sensores es adquirida utilizando una microcomputadora, la BeagleBone en donde son procesadas utilizando una red neuronal artificial para posteriormente obtener el mejor cromosoma utilizando un algoritmo genético.
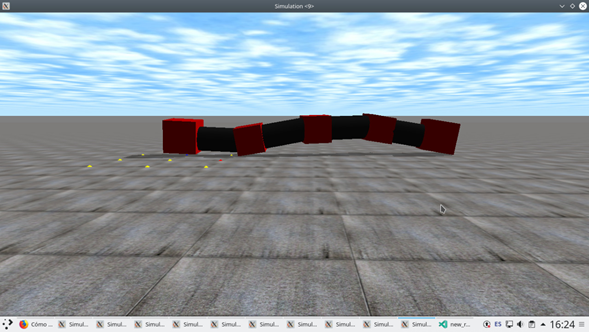
Fig. 3. Simulación del movimiento del robot utilizando PyroSim
El robot utiliza 6 sensores ultrasónicos, los cuales obtienen información del entorno en el cual se encuentra, estas señales capturas por los sensores son procesadas por la red neuronal y el algoritmo genético para posteriormente tomar una decisión, enviando una señal a los motores haciéndolos actuar para que exista un desplazamiento y pueda haber una evasión de obstáculos.
Las aplicaciones de este tipo de robots permiten la búsqueda de personas que puedan estar en peligro después de algún desastre natural, evitando así que rescatistas arriesguen su vida para salvar las de otros.
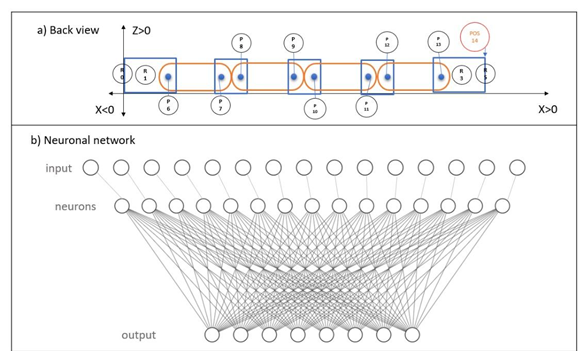
Fig. 4. Sistema de adquisición de datos de sensores utilizando redes neuronales
Actualmente Andrea ha obtenido una gran cantidad de resultados, de tal manera que actualmente se encuentra escribiendo su tesis para graduarse como Ing. en Mecatrónica de la Universidad Internacional con asesoramiento del Dr. Atoany Fierro Radilla.
Más noticias sobre Ingeniería Mecatrónica
