
Las pinzas robóticas inteligentes redefinen la manipulación, marcando un nuevo estándar dentro de Automatica Technologies.
El corazón de esta innovación radica en la convergencia de tecnologías de vanguardia. Por ejemplo, al integrar la visión por ordenador se amplían las capacidades de las pinzas robóticas, permitiéndoles detectar objetos translúcidos y reflectantes, lo que supera las anteriores limitaciones visuales de la manipulación robótica. El objetivo final es lograr unos “ojos robóticos” que posibiliten a los robots percibir objetos como lo harían los humanos.
Además, al fusionarlo con las redes neuronales y la visión por computadora, permite a los sistemas segmentar, diseñar y clasificar puntos de agarre óptimos, siendo especialmente beneficiosos en tareas como recoger artículos y despaletizar palés. En la búsqueda de eficiencia, la velocidad de las operaciones se vuelve crucial para las industrias. Esta misma búsqueda de eficiencia se ve potenciada por las pinzas robóticas híbridas innovadoras, las cuales combinan eficazmente las ventajas de las ventosas y la tecnología de sujeción. Mientras las ventosas son ideales para separar objetos, las pinzas garantizan un movimiento estable. Esta estrategia híbrida permite movimientos robóticos más rápidos, mejorando el rendimiento de manipulación de artículos de 300-400 por hora a unos asombrosos 1200. Además, puede manipular una variedad de artículos en términos de peso, forma y textura.

Gestión de materiales usando pinzas robóticas
Tradicionalmente, la manipulación de materiales era principalmente realizada de forma manual. Sin embargo, con la introducción de robots innovadores, ahora es posible procesar materiales a una velocidad cuatro veces mayor que las operaciones humanas. En un ciclo de tres turnos continuos, la productividad de un solo robot equivale a la de 10 o 12 personas, lo que promete un retorno de inversión considerable.
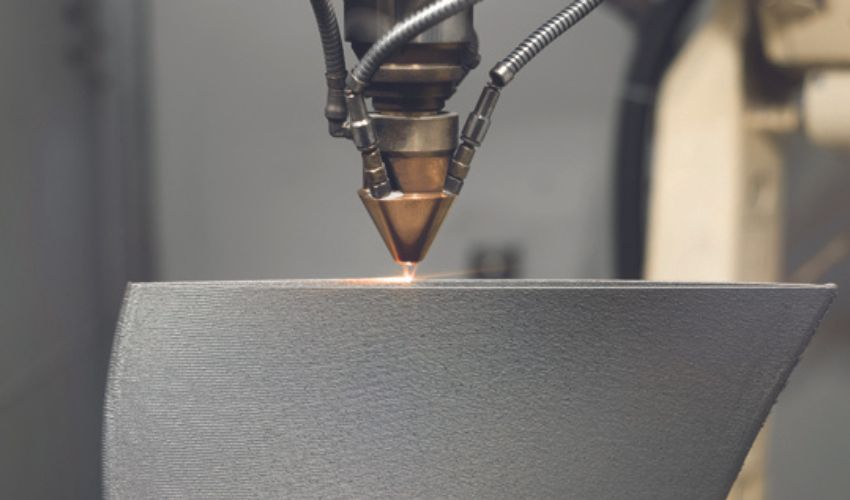
Por ejemplo, en el ámbito de la fabricación aditiva, también conocida como impresión 3D, se producen objetos tridimensionales a partir de archivos digitales mediante la construcción de capas sucesivas. El fabricante canadiense Anubis 3D emplea esta técnica en una variedad de herramientas de End of Arm Tooling (EOAT) incluidas las pinzas robóticas. La fabricación aditiva permite la creación de formas complejas, personalizadas y livianas con un mínimo desperdicio, costos de utillaje reducidos y la capacidad de iterar diseños rápidamente, lo que se suma a las mejoras en la manipulación de materiales proporcionales por los robots.
Retroalimentación táctil en Robots
Otra innovación relevante en el ámbito de las pinzas robóticas es la incorporación de retroalimentación táctil, lo que mejora significativamente las habilidades de manipulación y manejo de los robots, acercándolas a la sensibilidad y adaptabilidad de la mano humana. Los sensores táctiles tienen la capacidad de detectar pequeñas variaciones de presión y textura, permitiendo a los robots ajustar con precisión su fuerza de agarre. Esta precisión es crucial al manipular objetos delicados o de forma inusual, lo que reduce el riesgo de daños.
Los robots equipados con retroalimentación táctil pueden manipular una amplia gama de materiales y formas sin requerir programación previa. Además, al optimizarla fuerza de agarre, los robots pueden utilizar menos energía para sujetar objetos de manera segura, lo que resulta en operaciones más eficientes. Por último, los datos táctiles pueden emplearse para el aprendizaje automático, permitiendo a los robots la mejora continuamente su rendimiento con base en experiencias e interacciones previas.
Por supuesto, la seguridad sigue siendo de suma importancia. Las pinzas robóticas inteligentes modernas están equipadas con una serie de características diseñadas para garantizar la seguridad. Su capacidad para detectar obstáculos y reaccionar rápidamente ayuda a reducir el riesgo de accidentes.
RoboDK y sus pinzas robóticas
Un simulador puede ser utilizado por los ingenieros para explorar las distintas ventajas de las nuevas tecnologías de pinzas y cómo estas afectan el proceso de automatización robótica. El roboDK se disponen de varias herramientas para modelar pinzas, obtener estimaciones del tiempo de ciclo e incluso probar algoritmos de visión a través de su aplicación. La visualización de estas innovaciones pueden ayudar a que los efectos y mejoras de trabajar con estas nuevas tecnologías sean comprendidos por las partes interesadas entes de que se realice una inversión de hardware físico.
Fuente: RoboDK
Ingeniería en Mecánica Industrial
Más noticias sobre Ingeniería en Mecánica industrial
