
En el curso de Microcontroladores, los estudiantes llevaron el aprendizaje más allá del código y los diagramas para construir un prototipo funcional de un ascensor a escala, integrando hardware, software y lógica de control en un solo sistema. Este enfoque práctico permitió aplicar conocimientos teóricos en un contexto realista y retador.
El corazón del sistema: el microcontrolador
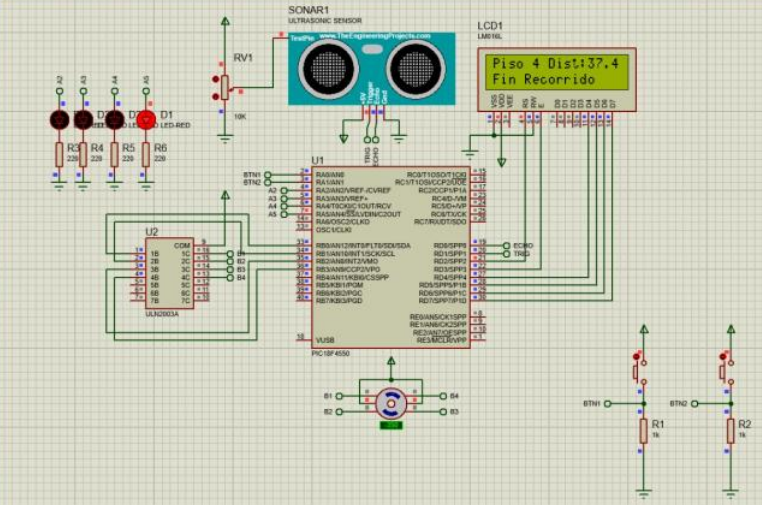
El proyecto se desarrolló utilizando el microcontrolador PIC18F4550 como núcleo del sistema. Desde este dispositivo se coordinó el funcionamiento completo del ascensor, demostrando cómo un microcontrolador puede gestionar múltiples entradas y salidas de manera eficiente y confiable.
Movimiento controlado: motor a pasos
Para simular el desplazamiento del ascensor entre pisos, se empleó un motor a pasos, el cual respondió correctamente a las instrucciones de subida y bajada mediante botones de control. Este componente permitió reforzar conceptos de secuenciación, control de giro y sincronización.
Sensores que dan información real
Uno de los elementos clave del proyecto fue la integración de un sensor ultrasónico, encargado de medir distancias y simular los diferentes pisos del ascensor en intervalos de 5 cm. Gracias a esta lectura, el sistema pudo identificar la posición de la cabina de manera precisa.
Comunicación visual del sistema
El estado del ascensor se mostró en todo momento a través de una pantalla LCD 16×2, donde se indicaba el piso actual, la distancia medida y acciones como “Subiendo” o “Bajando”. Adicionalmente, LEDs indicadores se activaban según el piso alcanzado, ofreciendo una retroalimentación visual inmediata.
Programación y lógica de control
Los estudiantes desarrollaron el código completo en lenguaje C, estructurando correctamente la configuración de puertos, lectura de sensores, control del motor y actualización de la pantalla. El programa mostró orden lógico, claridad y coherencia, cumpliendo con los criterios de calidad establecidos en la rúbrica.
Simulación y validación del proyecto
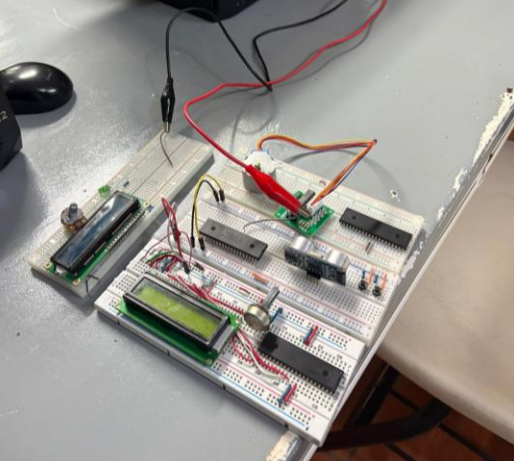
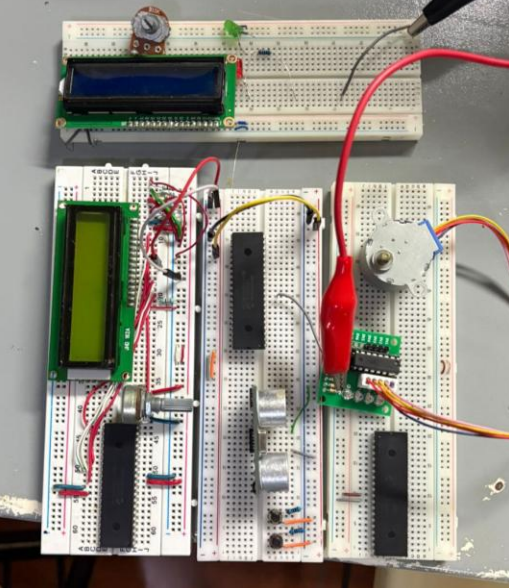
Antes del armado físico, el sistema fue simulado en Proteus, permitiendo verificar su funcionamiento y corregir detalles. Posteriormente, se realizó el montaje real del circuito, comprobando que el ascensor operara de forma estable y sin fallos durante las pruebas.
Resultados que hablan por sí solos
El prototipo logró simular correctamente el funcionamiento básico de un ascensor automatizado. El sistema respondió de manera adecuada a las entradas, mostró información precisa y mantuvo un desempeño estable, cumpliendo plenamente el objetivo del proyecto.
Más que un proyecto: formación ingenieril
Este trabajo destacó por su documentación formal, claridad técnica y correcta integración de hardware y software, alineándose completamente con la rúbrica del curso. Más allá del resultado final, permitió a los estudiantes fortalecer competencias esenciales en automatización, programación y control, acercándolos a los retos reales de la ingeniería.
Fuente: Trabajo de Alumnos
Ingeniería en Mecatrónica
Más noticias sobre Mecatrónica…
