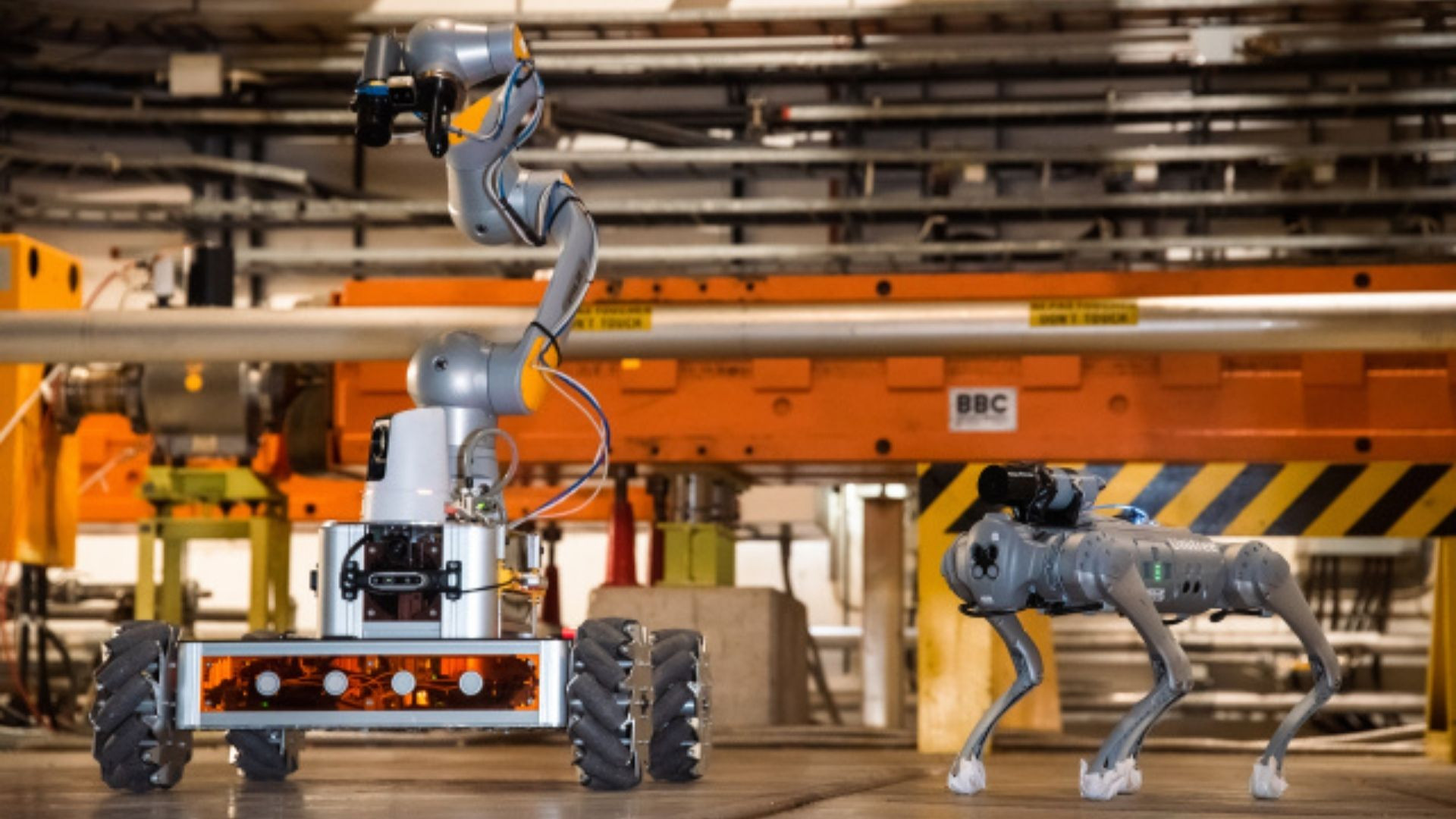
Así es como el CERN y este robot perro logran inspeccionar zonas con radiación. Conoce el último avance, el CERNquadbot, un robot de cuatro patas que revoluciona la exploración en entornos peligrosos y desordenados.
En un paso significativo hacia la mejora de la exploración dentro de las intrincadas instalaciones del CERN, una solución robótica de vanguardia conocida como CERNquadbot ha completado recientemente su primera prueba de protección radiológica dentro de la amplia zona norte del laboratorio.
Este innovador robot de cuatro patas marca un nuevo capítulo en la búsqueda del CERN de compañeros robóticos ágiles y adaptables para navegar en entornos desafiantes.
El CERNquadbot, que habita en el edificio 937, donde se desarrollan los robots más avanzados del CERN, destaca como una incorporación prometedora al arsenal robótico del laboratorio.

A diferencia de sus predecesores, que eran predominantemente ruedas o orugas, el CERNquadbot cuenta con cuatro patas, lo que ofrece estabilidad y maniobrabilidad incomparables en terrenos desordenados y desiguales.
Chris McGreavy, ingeniero en robótica del grupo de Controles, Electrónica y Mecatrónica (CEM) del CERN, destaca la importancia de este avance y afirma:
“Hay grandes partes de cables y tuberías sueltos en el suelo que se deslizan y se mueven, haciéndolos intransitables para vehículos con ruedas y difíciles incluso para los humanos.”
Implementación versátil en entornos complejos
La versatilidad del CERNquadbot se extiende más allá de su estabilidad, ya que está preparado para navegar por las intrincadas cavernas que albergan experimentos como el detector ALICE.
Equipados con algoritmos de control avanzados, estos robodogs están preparados para monitorear las condiciones ambientales y detectar rápidamente anomalías como fugas de agua o incendios. McGreavy enfatiza su papel fundamental y afirma:
“Pueden identificar fugas de agua o incendio y otros incidentes, como falsas alarmas, de manera oportuna, todo lo cual puede afectar significativamente el funcionamiento de las máquinas en las cavernas y túneles”.
Ecosistema de robótica complementaria
Cada robot está meticulosamente diseñado en el CERN para complementar a sus homólogos, optimizando las capacidades de exploración.
Mientras que el Monorriel de Inspección de Trenes (TIM) destaca en el seguimiento de grandes distancias dentro del Gran Colisionador de Hadrones (LHC) desde arriba, el CERNquadbot se aventura en territorios inexplorados en el suelo debajo de la línea de luz. McGreavy profundiza en su relación simbiótica y señala:
“Los TIM se utilizan para monitorear las grandes distancias del LHC desde arriba y pueden viajar largas distancias sin recargar. Pueden desplegar los quadbots en áreas locales para obtener más información sobre lugares específicos que el TIM no puede acceder fácilmente.”

Fuente: El Español
Ingeniería en Mecánica Industrial
Más noticias sobre Mecánica Industria
