El GPS se ha convertido en un aliado fundamental para cualquier viaje. Al menos en la superficie terrestre. Porque, si hablamos del mundo submarino, las reglas cambian sustancialmente.
Llega la tecnología UBL y GPS
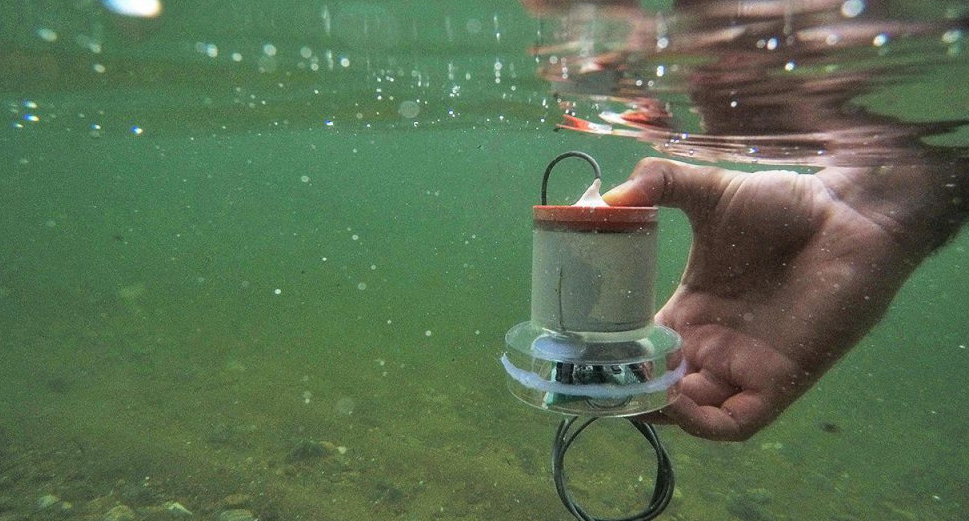
El dispositivo GPS que han desarrollado los investigadores estadounidenses se ha bautizado como UBL. Son las siglas de Underwatter Backscatter Location (algo así como localización submarina por retrodispersión). Aunque parezca un nombre complejo, el concepto es relativamente sencillo. Lo que hace es aprovechar el impacto de las ondas sonoras sobre un mecanismo piezoeléctrico en lugar de utilizar baterías. A modo de recordatorio, la piezoelectricidad consiste en generar electricidad por medio de presión mecánica en materiales específicos como el cuarzo. Pues bien, el UBL del MIT es un prototipo de localizador submarino que, técnicamente, podría operar de forma indefinida.
Lo que hace el dispositivo GPS fundamentalmente es absorber de forma selectiva parte de la energía de las ondas sonoras del medio submarino sobre el mecanismo piezoeléctrico, mientras que refleja el resto a modo de señal acústica. Posteriormente, un receptor traduce esa secuencia – ahí es donde entra el término “retrodispersión”- a un código binario. Así, el UBL emite respuestas a los impulsos acústicos que proporcionan información sobre cuestiones como la salinidad del agua y su temperatura. También permitirá la ubicación exacta de un animal marino y hasta los efectos del cambio climático en el medio submarino.
Ecos oceánicos
Aunque la tecnología GPS es muy prometedora, se enfrenta a varios retos. El principal de ellos es el eco. Esto se debe que a las señales acústicas no solo viajan hacia el receptor, sino también hacia el fondo marino y la superficie, rebotando sucesivamente. En aguas profundas no supone un mayor problema, ya que basta con utilizar ondas en diversas frecuencias, una técnica conocida como salto de frecuencia. Sin embargo, cuando hay poca profundidad el eco de las ondas se multiplica al chocar con el fondo y la superficie. Para resolverlo, los ingenieros del MIT han optado por modular las ondas mediante la reducción de la frecuencia de las señales o tasa de bits. Esto significa que no se emite una nueva señal hasta que la anterior se haya desvanecido.
El único problema de este enfoque es que los objetos en movimiento requieren una mayor tasa de bits para ser monitorizados. Si se espacian demasiado las ondas sonoras, el objeto ya habrá cambiado de posición. Encontrar un punto de equilibrio entre la profundidad del agua y el movimiento de los objetos rastreados es ahora el principal foco de la investigación.
Este tipo de desarrollos es crucial ya que, como apuntan los investigadores, se conoce mejor la superficie de la Luna que los fondos marinos. Una de las razones es que no se pueden enviar vehículos no tripulados durante largos periodos de tiempo, ya que se extraviarían. Y, hablando de vehículos de exploración, te recomendamos este artículo sobre robots subacuáticos inspirados en criaturas marinas.
Fuente: I´MNOVATION
Mas noticias sobre Ingeniería Ambiental…
