Sistema Automatizado de Brazo Robótico: La robótica ha experimentado un crecimiento significativo, convirtiéndose en una herramienta fundamental en la automatización de procesos industriales.
En el dinámico campo de la robótica, la automatización industrial se ha consolidado como una herramienta fundamental para optimizar procesos y aumentar la eficiencia. Los estudiantes de la materia de Robótica, bajo la guía de la Mtra. Luz Maria Rivera, han desarrollado un proyecto innovador que ejemplifica esta tendencia: un sistema automatizado basado en un brazo robótico y una banda transportadora. Este sistema está diseñado para simular procesos industriales de selección y empaquetado, ofreciendo una visión práctica de cómo la robótica está transformando las operaciones en diversos sectores.
Justificación: La Relevancia de la Robótica Aplicada
La iniciativa de este proyecto se justifica por su capacidad para representar un proceso funcional dentro del ámbito de la robótica aplicada. La construcción de una celda de trabajo que automatiza tareas de clasificación y traslado no solo demuestra los principios teóricos aprendidos en el aula, sino que también ofrece una aplicación práctica en un área clave como el embotellado industrial. Este enfoque en la aplicación práctica es crucial para comprender la importancia del proyecto y sus posibles beneficios académicos, el impacto en la institución educativa y su contribución al sector productivo.
Objetivos: Diseñando el Futuro de la Automatización
El proyecto se planteó con un objetivo general claro y una serie de objetivos específicos que guiaron todo el proceso de desarrollo.
- Objetivo General: Implementar un sistema automatizado basado en un brazo robótico y una banda transportadora, orientado a la simulación de procesos industriales de selección y empaquetado. También se busca desarrollar un brazo mecánico automatizado que manipule botellas con sensores ultrasónicos y servomotores, optimizando procesos industriales de transporte y almacenamiento, y evaluando su desempeño en términos de precisión, repetibilidad y tiempo.
- Objetivos Específicos:
- Seleccionar los componentes electrónicos y mecánicos adecuados para el sistema.
- Diseñar un sistema de detección precisa de botellas con sensores ultrasónicos.
- Programar el control del brazo robótico.
- Programar y calibrar servomotores para un movimiento eficiente del brazo.
- Integrar sensores para la detección automática de objetos.
- Realizar pruebas y ajustes del sistema completo para garantizar su correcto funcionamiento.
- Evaluar el rendimiento del prototipo mediante pruebas de precisión y estabilidad.
Marco Teórico: Los Pilares de la Robótica
El marco teórico de este proyecto se cimienta en la comprensión de la robótica y la automatización industrial. La robótica ha experimentado un crecimiento significativo en las últimas décadas, convirtiéndose en una herramienta fundamental en la automatización de procesos industriales. Los brazos robóticos, en particular, son comunes en tareas industriales por su precisión, eficiencia y repetibilidad, siendo especialmente eficaces en tareas repetitivas como soldadura, organización de productos, procesamiento de piezas, desbarbado y pulido. El diseño de un brazo robótico implica comprender y aplicar varios conceptos fundamentales de la robótica, incluyendo cinemática, grados de libertad, trayectorias de movimiento y modulación PWM, así como control automático y electrónica aplicada.
Desarrollo del Proyecto: De la Teoría a la Práctica
El proceso de desarrollo del sistema incluyó la selección cuidadosa de materiales y la implementación de un flujo de trabajo bien definido.
- Materiales: Los componentes clave del sistema incluyen:
- Arduino
- Fuente de poder
- Destornillador
- Protoboard
- Robot Studio
- Tinker cad
- Sensor ultrasónico
- Servomotor
- Jumpers
- Tuercas
- Base
- Brazo
- Llave Allen
- Tornillo
- Base de soporte
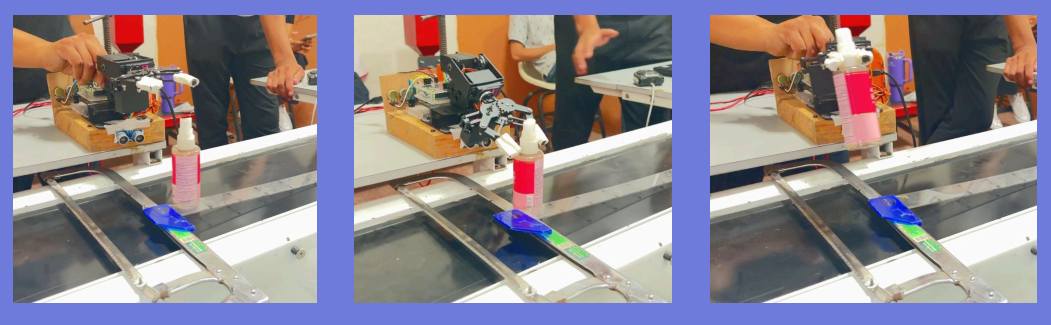
- Diagrama de Flujo y Flujo de Trabajo: Un diagrama de flujo detallado ilustra el proceso de embotellado simulado, desde el llenado de la botella hasta el empaquetado por el brazo robótico y el transporte hacia el almacén.
- Programación: La programación del sistema se realizó utilizando diversas herramientas:
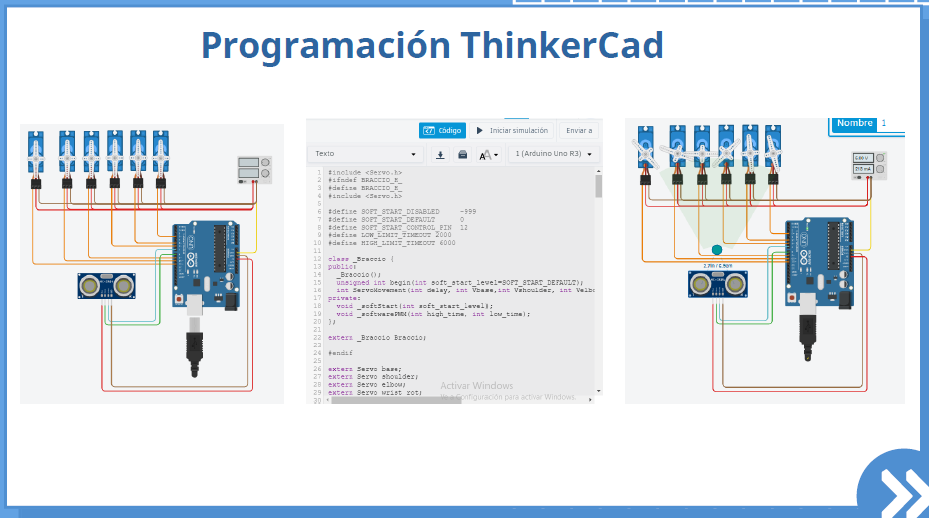
- Arduino: El código de Arduino se encarga de controlar el brazo de forma precisa y de procesar la información del sensor ultrasónico. El sensor detecta la distancia de las botellas, y la combinación de ambos permite automatizar el proceso de selección.
- Tinkercad: Esta herramienta fue fundamental para simular el funcionamiento del brazo robótico y del sensor ultrasónico antes de construir el circuito real, lo que permite realizar ajustes y pruebas virtuales.
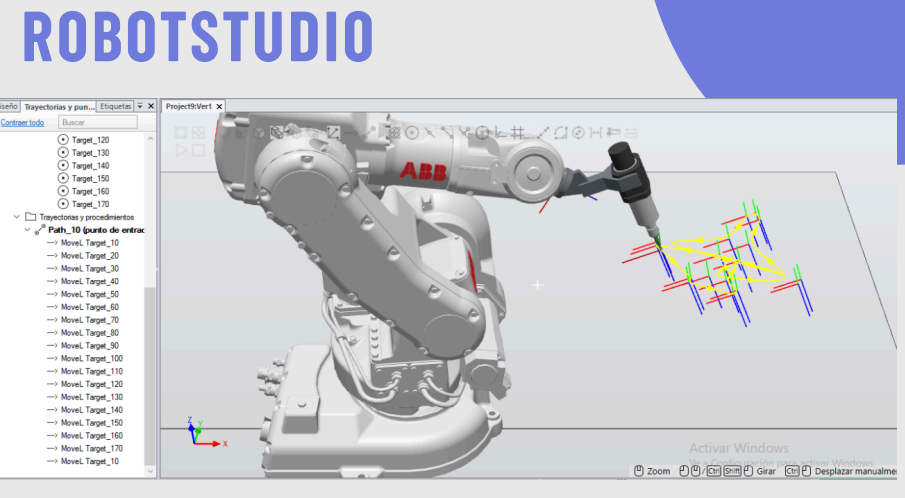
- RobotStudio: Se utilizó para el diseño de trayectorias y procedimientos del robot, lo que facilita la planificación de los movimientos del brazo.
Resultados y Conclusiones: Un Paso Hacia el Futuro
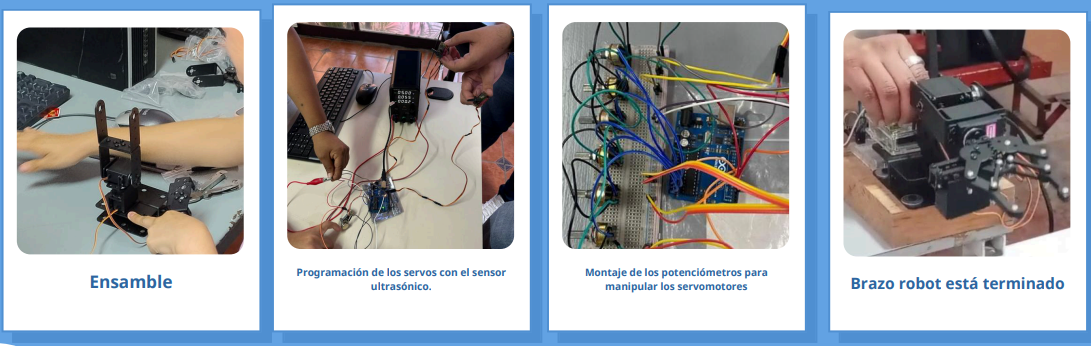
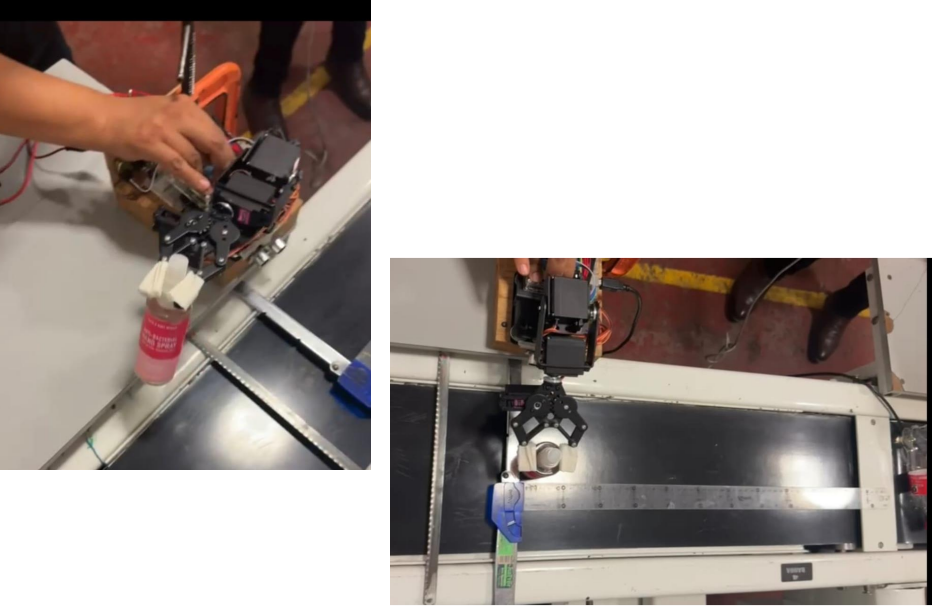
Los resultados obtenidos fueron valiosos y demostraron la viabilidad del proyecto. Fue posible diseñar y programar un robot funcional desde cero, incluso con conocimientos básicos iniciales. Las pruebas de ensamblaje, la programación de los servos con el sensor ultrasónico y el montaje de los potenciómetros para manipular los servomotores resultaron exitosos, culminando en un brazo robot terminado.
En síntesis, este proyecto no solo ha logrado implementar un sistema de automatización efectivo, sino que también ha brindado a los estudiantes una experiencia invaluable en el diseño, programación y puesta en marcha de un sistema robótico, reafirmando la importancia de estas habilidades en el panorama industrial actual.
Fuente: Trabajo de Alumnos
Ingeniería Industrial y de Sistemas de Calidad
Más noticas sobre Ingeniería Industrial y de Sistemas de Calidad
